電気流体力学と静電気力による推進装置
EHD推進機における推進方向の制御
キーワード; 金属の分極、電荷、静電容量、電界、大気イオン密度、弱電離プラズマ
Keyword; EHD, Electrostaic, Propulsion, Charges, Capacitance, Polarization effect in Asymmetrical Metal Structure, Plasma
2016.2.15
2022.10.17
2023.08.01
2023.08.02
2024.07.05
2025.03.17
2025.11.05
2025.11.13 修正があります。
EHD推進機の横方向推進に関する制御法を以下に示す。
1)上部ワイヤ分割法
2)下部コンデンサ法 Ver1
3)下部コンデンサ法 Ver2
4)横方向直接推進法
ここでは、EHD推進デバイスの横方向への推進に関する制御について述べる。
EHD推進デバイスの浮上特性の特異性、すなわち、重力方向の浮上特性に関する研究はすでに行った。EHD推進デバイスの従来のヘリやドローンとの飛行特性の違いについて以前すでに示した。EHDデバイスは高電圧を入力すると推進力が発生し浮上する。私はEHDデバイスの浮上特性について明らかにした。また、推進デバイスにおけるパルス電圧印加によるある一定の高度への制御、及び、速度を落とした上昇、下降方法についても示した。しかしながら、水平方向への推進方法については今まで示されたことがない。デバイスをドローンの様に空間を自由に運動させるためには、重力方向での上下の運動だけでなく、水平方向への推進方法を示すことが必須となる。
ここでは、浮上の原理に加え、どのように水平方向に推力を発生させるか、その原理について述べ、具体策を示す。
重力方向に対して垂直な水平方向への推進を目的とし、2重リング構造上部分、細線ワイヤー部の分割、もしくは、下部に新たに多重電極で構成された単極コンデンサを加える方法を示した。さらに、簡単な実験を行い、実際に2つが機能することを示した。
横方向の推進原理
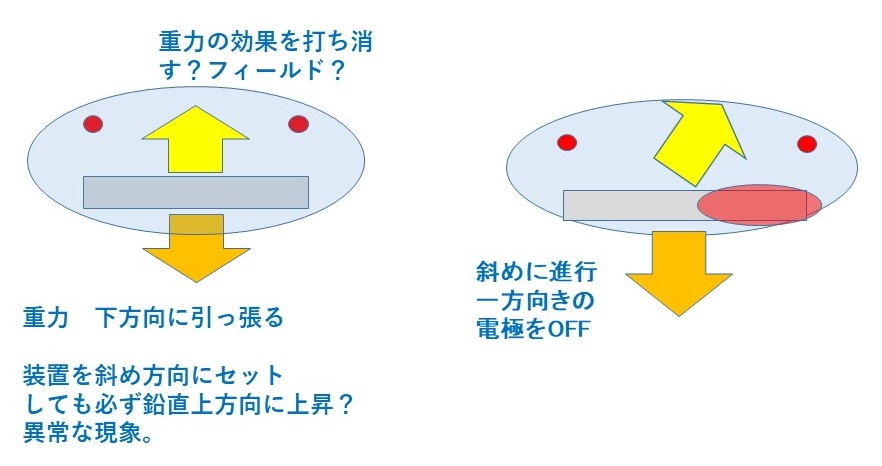
図1、 EHD推進機 の横方向への推進 概念図

図2、EHD推進機の上下電極構造1例
ここでは、EHD推進デバイスの横方向への推進に関する制御について述べる。
このデバイスは原理的に重力に反発するように浮上する挙動を示すため、これを利用して斜め方向に推進させることを考える。
すなわち、この反発する方向を垂直上方向から斜めに変化させることで横方向の力を発生させる。
図1にその推進原理の概念について示す。さらに、図2にデバイスの簡単な2重リングでの電極構造の1例を示す。前提条件として、図1ではパルス高電圧印加により、EHDデバイスは浮上状態にあり、浮上と下降を繰り返して同じ高さにいる。その際、EHDデバイスの周囲に何らかのフィールドが形成されているものとする。そこで、ワイヤーへの一部電圧の印加をやめると、そこの部分のフィールドが弱まる。また、下部電極に追加コンデンサを配置し、そのコンデンサへの印加電圧を0とする。図1の状態では、下からの場に対して反発するように浮上しているが、フィールド同士が斜め方向に反発することになる。力のベクトルで説明すると、浮上力に加えて新たに右方向に進む力が発生することになる。
図3 上部電極ワイヤの分割
図3に推進方向の制御に関して、上部ワイヤの分割を用いた推進方法の具体例を示す。
具体的には、ワイヤーを空間的にある部分だけ欠損させる、ワイヤーのある部分だけ電気導通をOFFにすることで実現させる。
ここでは、ワイヤは6領域に分割されている。1つの高電圧電源から電荷を供給している。このスイッチ6つを接続したり、切り離すことで推進方向の制御を行う。
(a)
(b)
(c)
図4、下部追加コンデンサの配置方法 (a)1 ON状態,(b)2 ON状態, (c)3 ON状態
図4にEHD推進機において下部に追加された複数の単極コンデンサの配置方法による推進方向の制御方式を示す。
この単極コンデンサとは、蓄電率の改善された多層化単極コンデンサを示す。このコンデンサはスイッチとともに接続されており、スイッチが入っていない場合に下部電極と完全に静電結合が生じない距離で配置、すなわち、静電作用で電荷が蓄積しないようになっている。スイッチで、電荷のチャージON/OFFを行う。スイッチOFF状態では、電荷が消失するものとする。ここでは、単極コンデンサは3個で構成されている。
3個だけにこだわらず、3の倍数の複数個でも可能である。1つのコンデンサをONにすると、
図5 直接的横推進方式
ここでは、横方向直接推進法と呼ぶ方式での推進機の下部の分極構造を示す。図5の中央に示すように負電極の先を左側に曲げ、高電圧を印加する。その結果、右側に曲がるような推進力が機体に発生する。推進機が上昇するとき、上昇しながら右方向に斜めに傾きながら連続的に曲がってゆく。推進機が滞空するならば、右方向にスライドするように動く。
反対に今度は負電極の先を右に曲げる。その結果、左側に曲がるような赤印の方向の力が機体に発生する。
こうして図6の様に、推進機を自由な方向に動かすことが可能となる。
図6、推進方向制御 その1 右側に曲がる
図7、横方向直接推進法 実験実施1例
多層コンデンサが存在 推進力を増加するように働く。
○推進方向制御の実験結果

図、3方向横方向直接推進法
横方向直接推進法 動画
実験の結果を図に示す。
吊り下型EHD推進装置の電極に高電圧を印加すると、3方向に進むことを実験的に確認した。
スイッチを3つ切り替えることで、水平のX−Y平面で任意の方向に進むことが可能である。
考察
推進器を水平方向に飛ばす際、高さを維持するためにパルス電圧の印加は必須である。
図3に示すようにワイヤの一部の通電をなくし、空間的にEHDデバイスの電界の空間分布を不均一とし、電界が弱くなっている方向に飛行させる。構造を工夫し上部ワイヤの分割数数を多くすると、上方から見ると瞬間的に2次元的に自由方向に推進できることになる。ドローンと比べ自由度が高い。また、横方向の速度であるが、地面に接していないので摩擦は少ないでしょう。空気との摩擦はあるが、力を長時間横方向にかけ続ければ速度はかなり大きくなる。空気抵抗との兼ね合いとなります。
図4では、上部分はそのままでデバイスの下部に別途コンデンサを複数配置させて直接的に進行方向に浮上力を発生させる方法を示した。しかし、方向を制御するコンデンサは、全て電荷を蓄積させるタイプでも、内部が空洞の円柱タイプの推力発生器でもどちらでもかまわない。EHDデバイスを地面に対して平行な姿勢から傾けることができます。
上部を改造する方法と下部に追加でコンデンサを配置する方法についての利点と欠点を述べる。
ワイヤ分割法の欠点としては、スイッチを切断したときに全体の浮上力・推力の低下が生ずる。また、ワイヤを保持している構造が複雑化し、保持が不安定となる。細線の配置は構造・設計が面倒となる。飛行中での空力の問題がある。付加的単極コンデンサの場合、浮上力が維持される利点がある。また、構造が安定的で配線の引き回しが楽である。欠点として、OFF状態では浮上力の余剰の負荷となる。
2025.11.05
追記
横方向の推進特性に関して
横方向直接推進方法を用いて、本体のEHD推進デバイスに搭載し、横方向に飛行させてみました。
その動画をOptical flow方法により解析を行い、位置、速度、加速度の解析を行いました。すると、面白い特性が見えました。
横方向の推進について、オプティカルフローによる解析を行った結果、横方向のEHD推進デバイスに電圧を印加すると瞬間的に力が働くが、その後ほぼ同速度運動をすることが明らかになりました。 動き出す前に力がかかるが、動き出した後には電圧が印加されているにもかかわらず、その力が減衰してほぼ観測されない。たとえるとサーファーが波に乗ってサーっと移動しているように見える。つまり、何か媒体の流れがあり、それに乗っかっていると考えられる。
この加速度発生に関しては、重力方向の推進と全く同じ傾向が見られましたことをご報告します。
2025.10.18
参考文献
T. Saiki,
“Control of Propulsion in Horizontal Direction for EHD and Electrostatic Propulsion Device”, viXra.org e-Print archive, viXra:2212.0005.?https://vixra.org/abs/2403.0045.?2024 Mar. 12, 8page
